
Research
Motion-Less VR
We aim to create a VR system that lets users freely control a virtual body without moving their real body.
Current virtual reality (VR) system uses motion capture to measure the motion of the real body and move the virtual body. In this case, however, the range of virtual space in which the user can move depends on the size of the real space, and the motion that can be performed with the virtual body is limited to that which can be performed with the real body. Therefore, we aim to realize a VR system without real body motion (Motion-Less VR) by suppressing real body motion, accurately acquiring the intention of motion, and presenting the sensation of motion.
Acquisition of Motor Intent
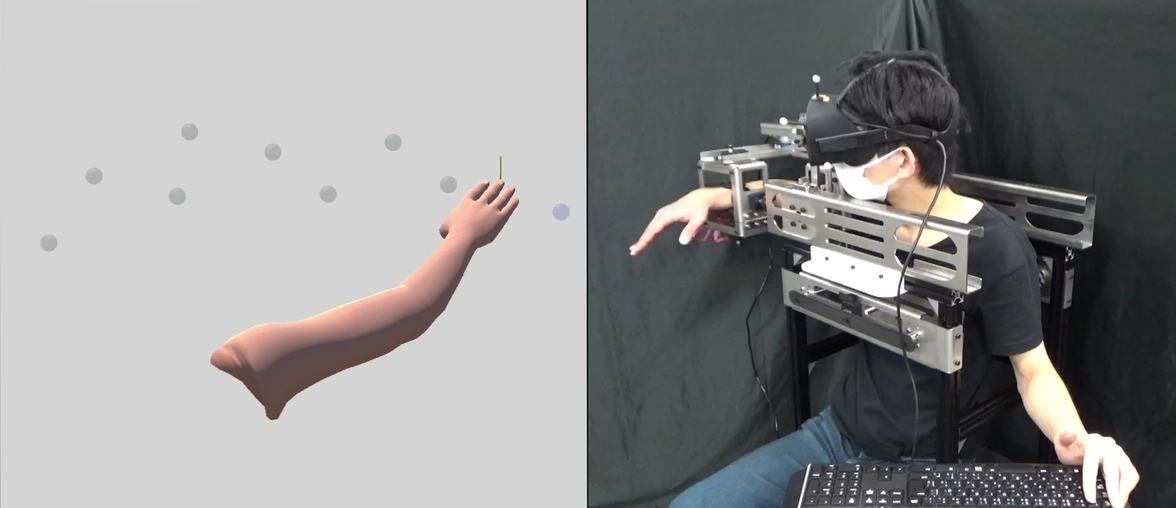
For an avatar to feel as natural to control as one’s own body, the system must capture the user’s intent to move at the very moment it arises and reflect it immediately in the virtual body. We are refining this process to raise both accuracy and overall operability, aiming for smooth, discomfort-free interaction.
Presentation of Kinesthetic Sensations

Motion-Less VR hinges on enabling users to “feel movement” even while their body remains still. Our laboratory is working to strengthen and prolong this kinesthetic illusion so that natural sensations cover nearly the entire range of joint motion. Ultimately, we seek an environment where users can vividly experience whole-body actions without relying solely on vision.
Evaluation and Mitigation of VR Sickness


Because Motion-Less VR combines visual, vestibular, and somatosensory cues in ways that differ from conventional VR, the degree to which it causes VR sickness is still unknown. We first quantify the frequency and intensity of discomfort through subjective assessments, then use these findings to optimize visual presentation and external stimuli, suppressing sickness as much as possible. Our goal is a system that remains comfortable even during extended use.
Past Research
Research on the Proteus Effect

In virtual environments, an avatar’s appearance and its surroundings can influence user behavior and psychology. Focusing on this “Proteus effect,” we conduct experiments that systematically vary avatars and environmental conditions to analyze patterns and causes of behavioral change. The insights gained will inform guidelines for avatar and environment design in applications such as education and rehabilitation.
Electric taste
This is a research of creating an artificial taste sensation through electrical stimulation.
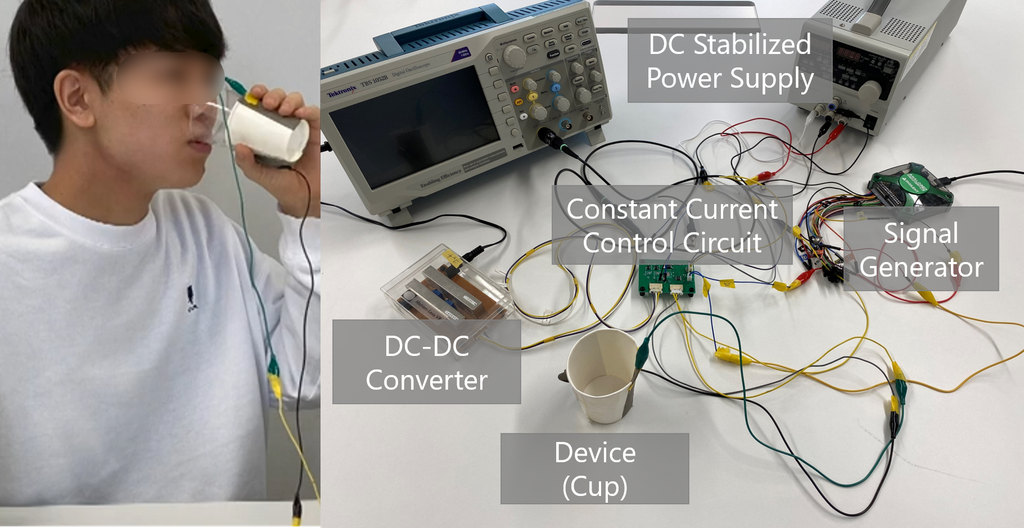
Taste is a sensory organ with many unexplored aspects. In recent years, much research has been conducted on the use of electricity to present and change the sense of taste. If we can artificially create and freely control taste and eating and drinking experiences using electricity, we may be able to improve the quality of life in our daily lives and our sense of reality in the artificial world. Therefore, we are conducting research on increasing the salty taste and amplifying the carbonation of carbonated beverages using electrical stimulation.
Electric taste
This study investigates the simultaneous elicitation of multiple phantom sensations in order to present tactile feedback over a wide area using only a small number of vibration actuators.

To achieve wide-area tactile perception with a limited number of actuators, we focus on phantom sensation, in which two-point vibration on the skin produces a perceived touch at an intermediate location. We place four actuators in total—two on the volar (palm) side and two on the dorsal (back) side of the forearm—and examine conditions under which two phantom sensations can be elicited simultaneously by applying two pairs of vibration stimuli. We will systematically organize the effects of fixation methods and vibration propagation, and aim to clarify design guidelines for a lightweight wearable haptic device.
Body Schema Calibration
This research is about adapting the perception of the body to an avatar in a virtual environment.
Normally, we can move our own real body freely and unconsciously. However, in a VR system, if the shape of the virtual body differs from the user's own, the operability of the virtual body is reduced. We hypothesized that the cause of this problem is the deviation of the model in the brain that remembers the body shape, called "body scheme". Therefore, we have proposed a method to adapt body scheme optimized for real body to virtual body shape, and we are currently verifying the effectiveness of this method. The method is expected to advance systems and services using virtual reality, such as remote communication and immersive operation of remote robots for medical and disaster relief.
© 2023 NIPPON INSTITUTE OF TECHNOLOGY, Faculty of Advanced Engineering, Department of Robotics, Artificial World Implementation Laboratory