ポートフォリオ
プロフィール
| 氏名 | 清水 太陽 |
| 所属 | 日本工業大学大学院 工学研究科 機械システム工学専攻 |
| 所属研究室 | 人工世界実装研究室(日本工業大学) |
| 研究室テーマ | Motion-Less VR(MLVR)における運動意図取得装置の開発と操作性向上 |
| 専門・関心分野 | ロボティクス、ヒューマンインターフェース、機械設計、運動意図取得、CNC加工 |
| できること | ・機械設計:Autodesk Inventor Professional、SolidWorks ・実装:UnityによるVR実験システム作成 ・加工:CAM作成、CNCマシニングセンタ加工、仕上げ、寸法検査 ・研究開発:運動意図取得装置の設計、トルクセンサを用いた計測、操作性評価実験 |
| 研究内容 | |
| 2024年 | 操作性向上を目的とした上肢2自由度の運動意図取得装置の開発 |
| 2025年 | 上肢2自由度の運動意図取得装置のソフトウェア的な操作性向上手法の有効性の検証 |
| 2026年 | ~研究中~ |
Motion-Less VRとは
Motion-Less VR(MLVR)は、大きな実身体動作を伴わずに、関節トルクなどの運動意図を取得し、VR空間上のアバターへ反映するシステムです。
現実空間の広さや身体の可動範囲に依存しにくい操作手法として、VRコミュニケーション、遠隔操作、身体機能に制約のあるユーザの活動支援などへの応用を目指しています。
開発物
動きを伴わない上肢2自由度運動意図取得装置(MLVR)
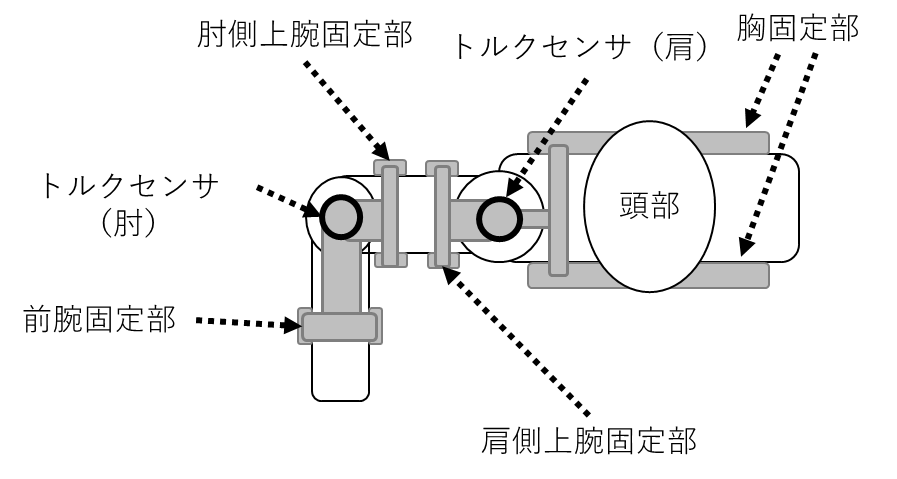


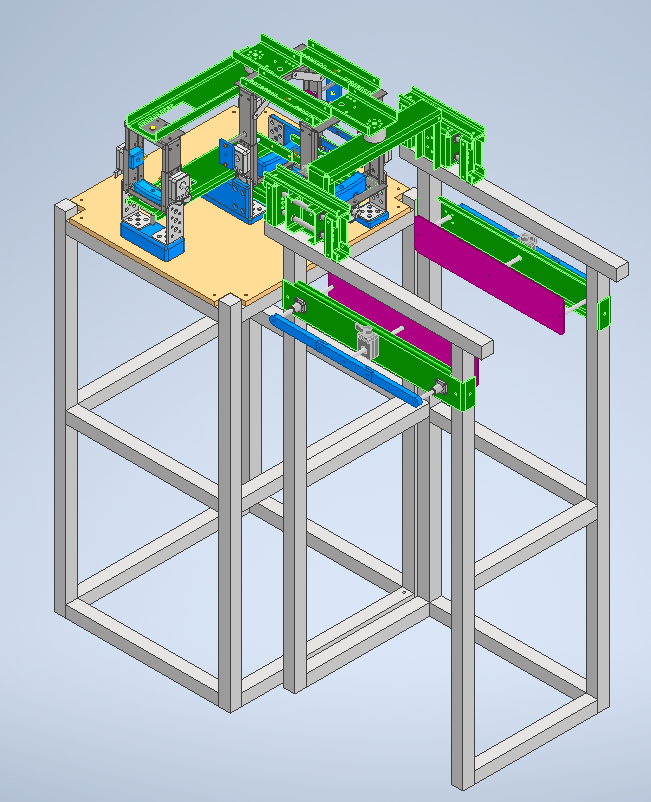
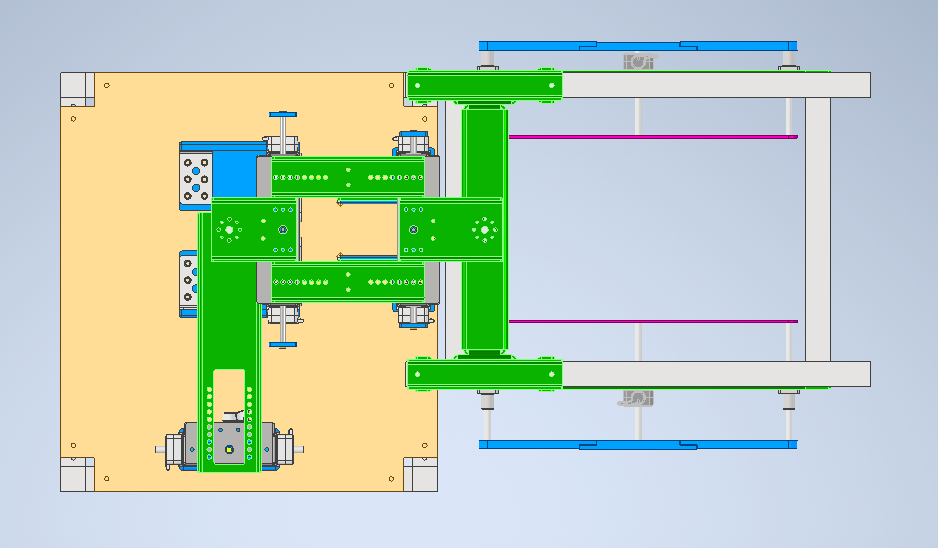
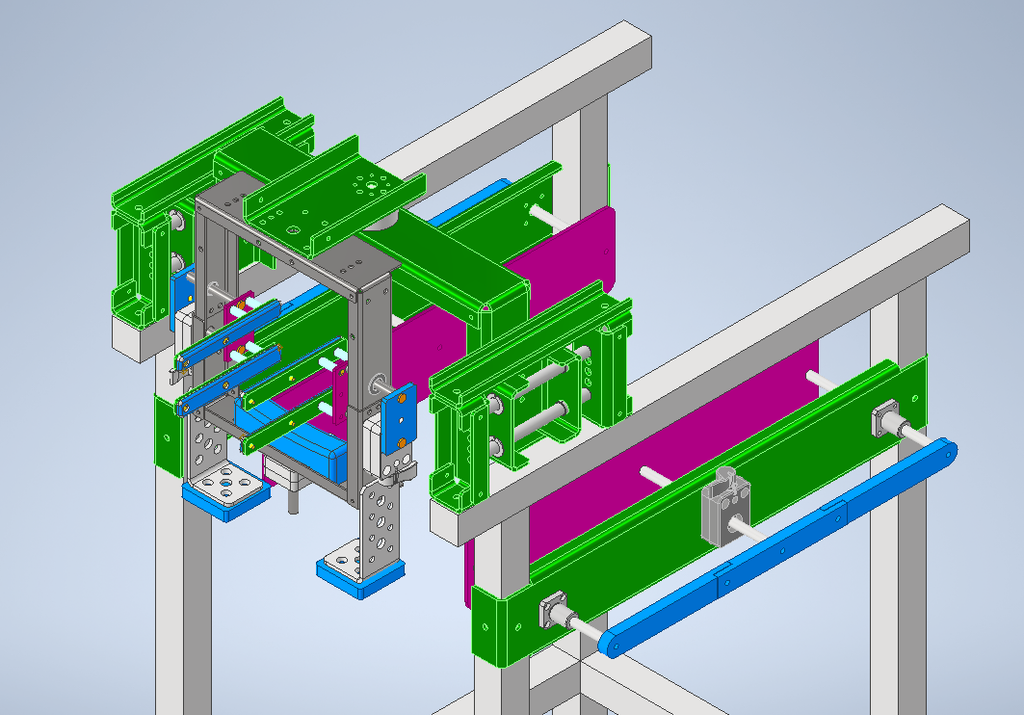
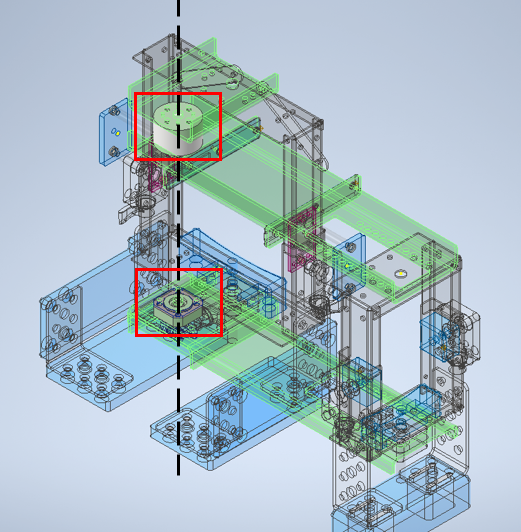
装置仕様、工夫
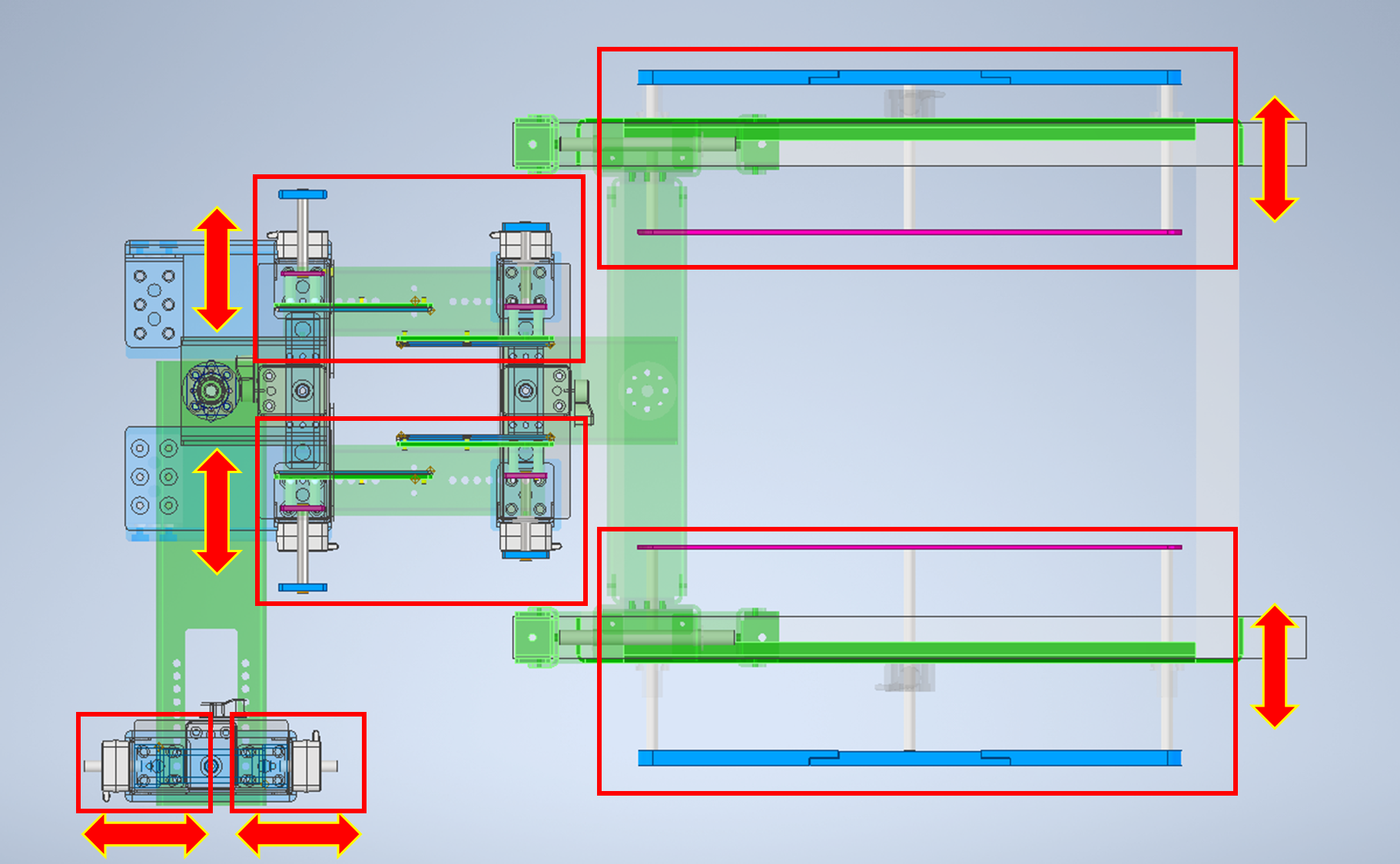
本装置では、他研究への応用や機能追加を想定し、単純な機構構成と拡張性を重視して設計しました。
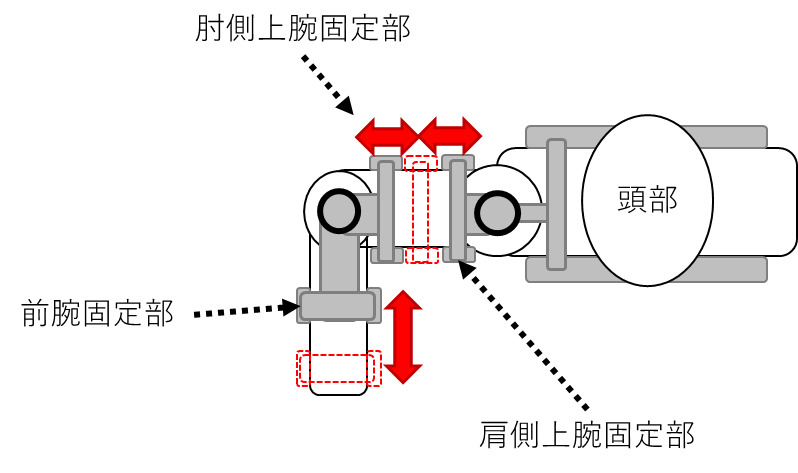
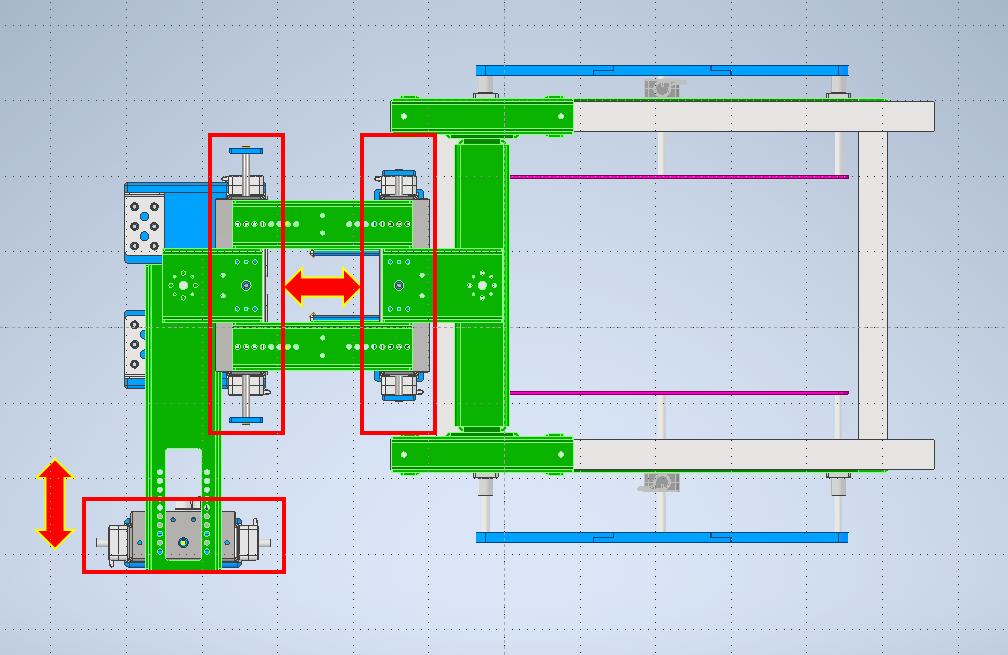
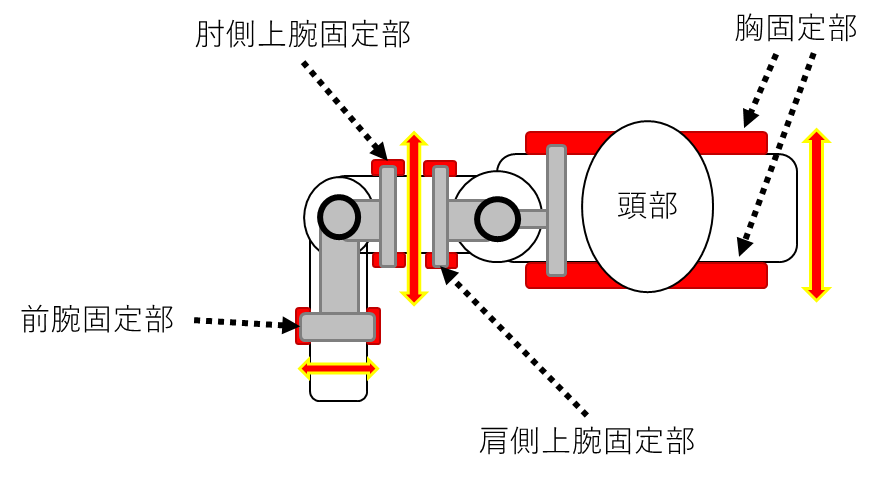
前腕長・上腕長、腕部や胸部の厚みに応じて固定位置を調整できる構造とし、複数の体格に対応できるようにしました。
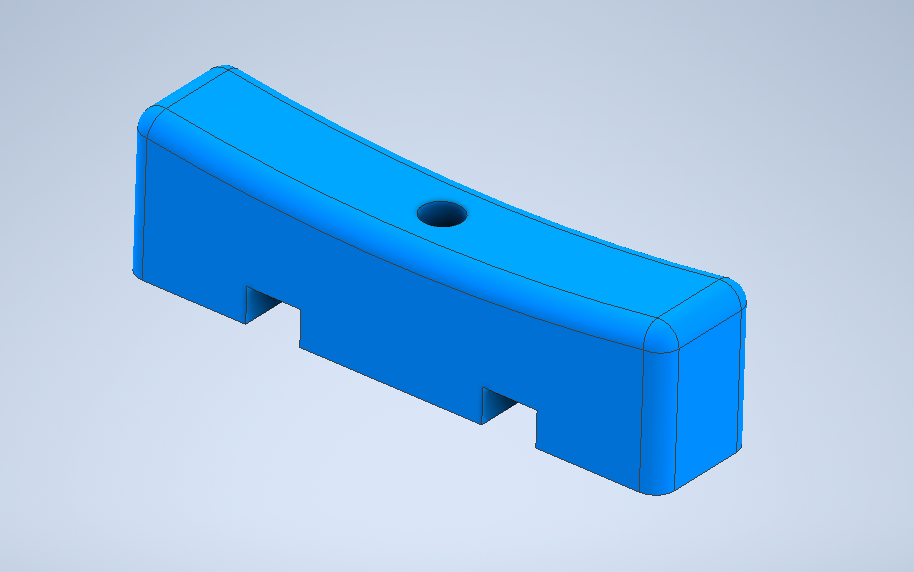
また、身体と接触する部品には大きめのフィレットやクッション材を設け、装着時の安全性と快適性に配慮しました。
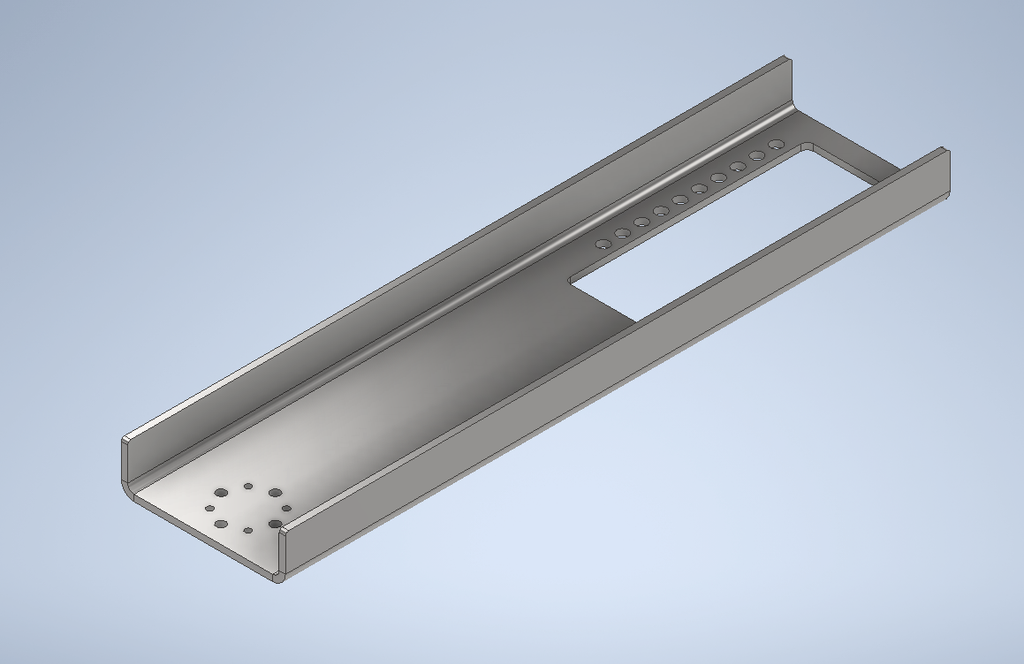
直線形状の部品には板金部品を採用し、製作コストを抑えつつ、フランジを設けることで腕力に耐えられる剛性を確保しました。
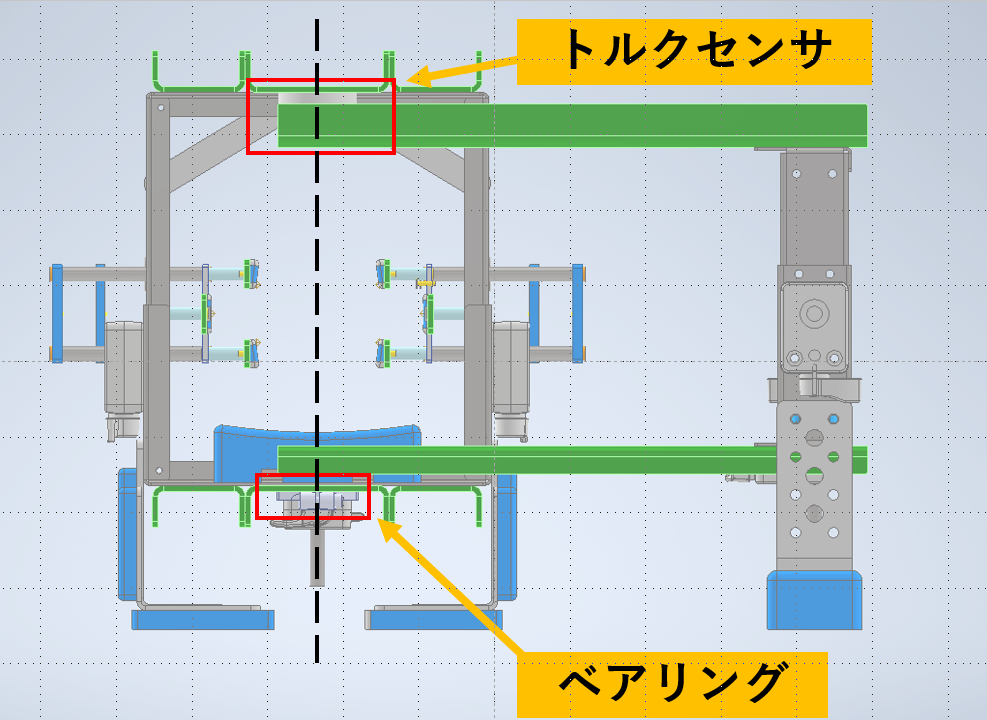
また、両持ち支持構造により剛性を確保しながら、対象軸まわりのトルクをトルクセンサへ伝えるため、トルクセンサと同軸上にベアリングを配置しました。
さらに、装置と支持台の接触部にはボールベアリングおよびPTFEシートを用い、摩擦による計測トルクの減衰を低減しました。
実験への応用
2025年「上肢2自由度の運動意図取得装置のソフトウェア的な操作性向上手法の有効性の検証」の研究で使用
2025年の研究では、本装置を用いて上肢2自由度MLVRの操作性評価を行いました。
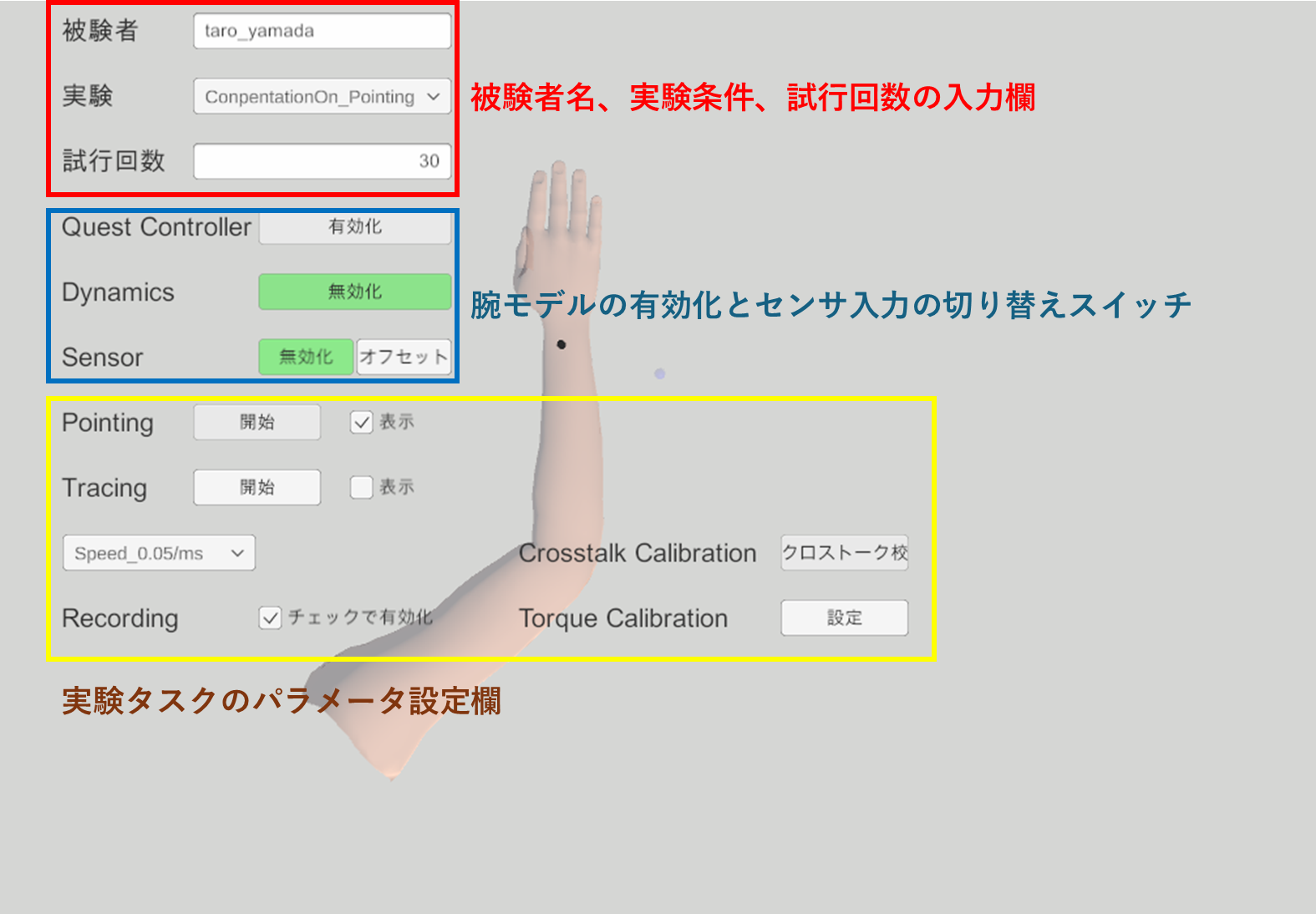
研究目的に合わせて固定関節角度を調整し、ポインティング課題、低速トレーシング課題、高速トレーシング課題の3種類の実験タスクを作成しました。
また、被験者情報、実験条件、試行回数、タスク条件を管理画面から切り替えられるようにし、Unity上で実験システムを実装しました。


- 操作性をより適切に切り分けて評価するために実験タスクを追加作成、調整
実験タスクを3種類に増やし、管理画面で切り替えられるように調整
CADソフト:Autodesk Inventor Professional
実験タスク作成&アバター生成に使用したソフト:Unity
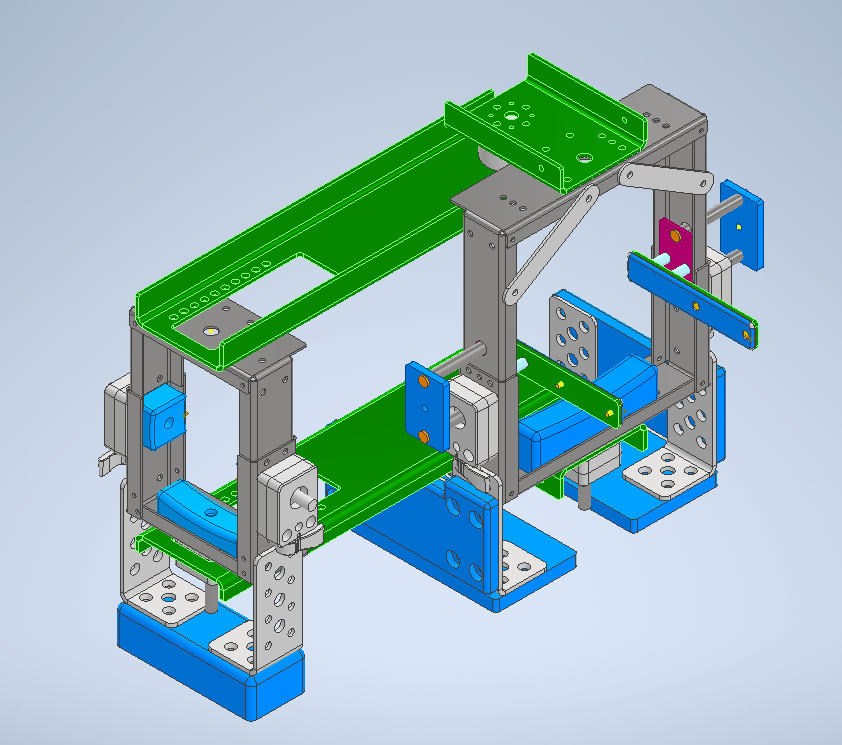
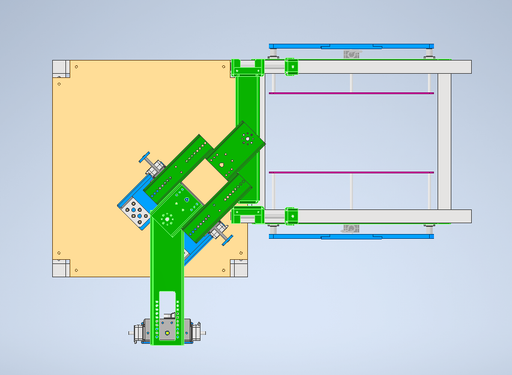
現実身体の動作をアバタに反映する上肢2自由度運動意図取得装置
開発物の概要
比較条件として、現実身体の肩・肘動作をアバターに反映する上肢2自由度操作装置を開発しました。
ユーザの肩関節および肘関節の運動を屈曲伸展方向に制限し、装置先端に取り付けたMeta Quest 2コントローラーの位置・姿勢情報を用いて、実身体の動きをアバターへ反映しました。
実務経験(インターンシップ)
| インターンシップ先企業名 | 株式会社ロビット |
| 所在地 | 〒174-0051 東京都板橋区小豆沢4-26-13 |
| URL | https://robit.co.jp/ |
| インターンシップ期間 | 2025年3月~ |
経験業務内容
製品開発に関わる部品加工、治具設計、組立補助、修理対応を経験しています。主に、金属・樹脂部品の加工計画、CAM作成、CNCマシニングセンタによる切削加工、加工後の仕上げ、寸法検査を担当しました。
使用機械はFANUC ROBODRILLシリーズ、Brother SPEEDIOシリーズ、使用ソフトはAutodesk Fusion 360、SolidWorksです。
主な経験業務
- 加工部品形状と材料特性を考慮した加工計画の作成
- CAMデータ作成およびCNCマシニングセンタによる切削加工
- 加工後のバリ取り、寸法検査、タッピング、穴あけ加工
- 切削工具、加工機、消耗品の管理
- 製品に使用する治具の設計
- 製品の組立補助、修理対応