佐々木 舜哉 / Shunya Sasaki
出身:千葉県
趣味:キャンプ、Vtuber
連絡先:shunya.nitmlab@gmail.com
これまでの研究の流れ
学部:pMMG(空気圧式MMG)による運動意図取得
学部では、Motion-Less VR(MLVR)の実現に向けて、身体を固定した状態でも「動かそうとする意図」を取得する方法について研究しました。MLVRは、実空間で身体を動かさずに、運動意図を取得して仮想空間上の身体動作へ反映することを目指す技術です。手指のように小さな関節が密集する部位では、関節ごとにトルクセンサを取り付けることが難しいため、手指を動かす筋が集まる前腕から運動意図を取得する方法に着目しました。
その中で、pMMG(pressure-based Mechanomyogram)を用いた運動意図取得に取り組みました。pMMGは、筋収縮に伴う皮膚表面の膨らみを、密閉した空気袋内の圧力変化として取得する方式です。電極を用いる表面筋電図とは異なり、皮膚状態や電気的ノイズの影響を受けにくく、装着しやすい点が特徴です。
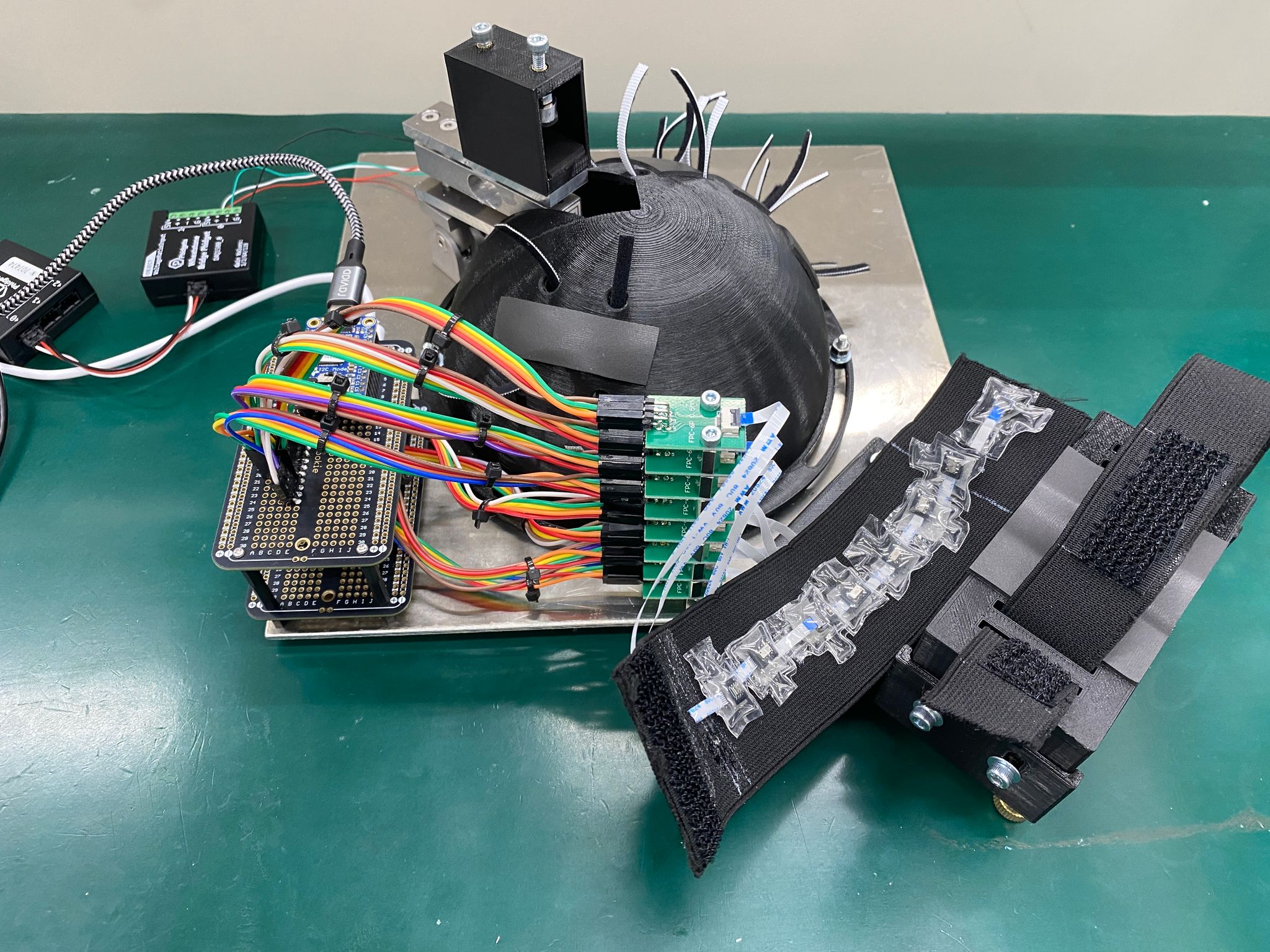
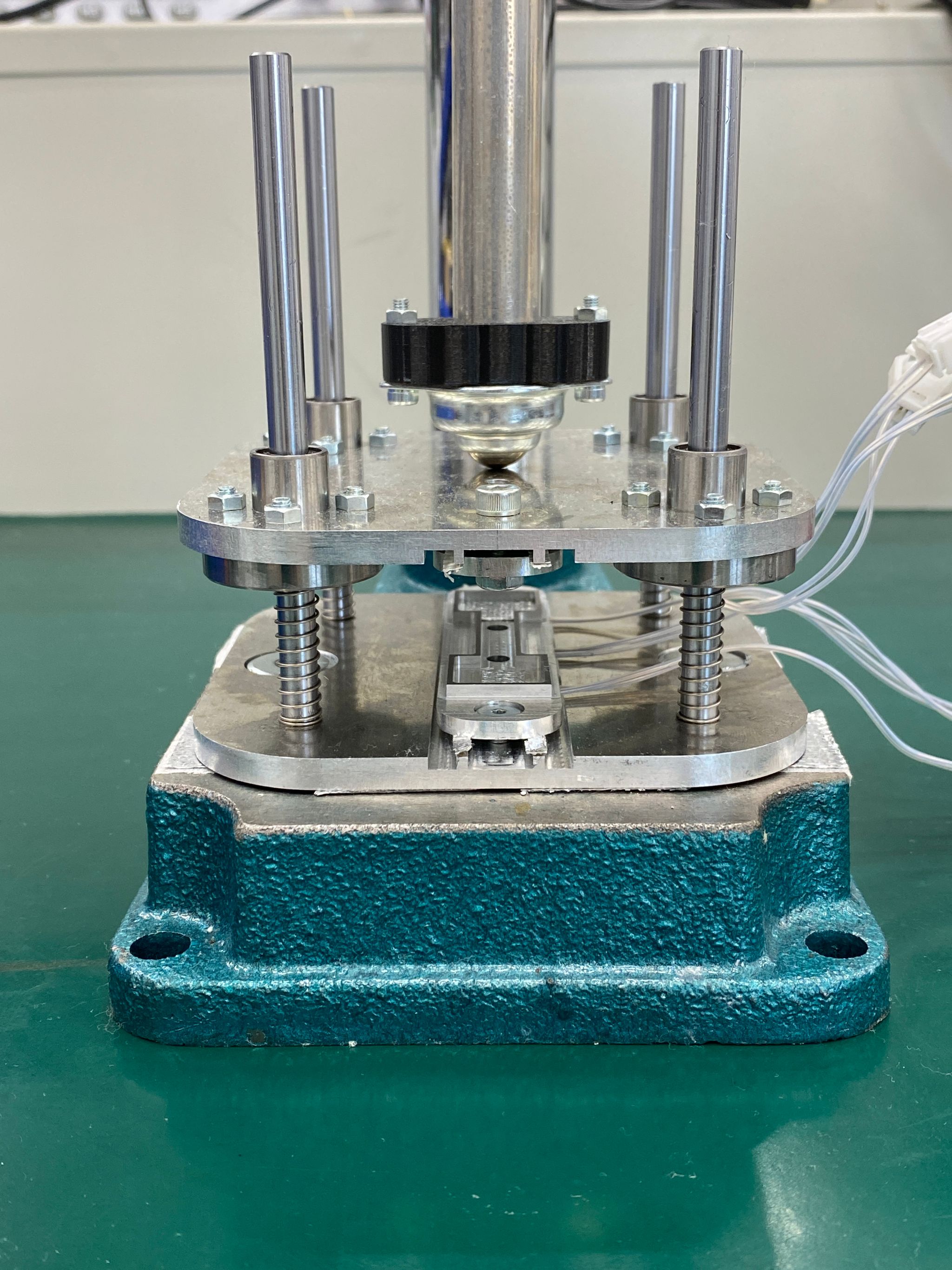
研究では、TPUフィルムを熱圧着して空気袋を作成し、空気圧センサを内蔵したpMMGセンサを実装しました。また、ロードセルを用いた力計測と比較し、pMMGセンサの応答特性を評価しました。その後、手指を固定した状態で示指の屈曲・伸展を行おうとした際の力と、手首周囲に装着したpMMGセンサの圧力変化を計測し、身体固定時の運動意図取得に利用できるかを検討しました。

大学院:超音波画像を用いた五指力推定
大学院では、pMMGで得た「前腕から手指の運動意図を取得する」という考えを発展させ、前腕Bモード超音波画像を用いた五指等尺性屈曲力の推定に取り組んでいます。超音波画像は、筋収縮に伴う筋の形態変化を画像として取得できるため、表面から得られる信号だけでは捉えにくい深部筋の変化も含めて観察できる可能性があります。
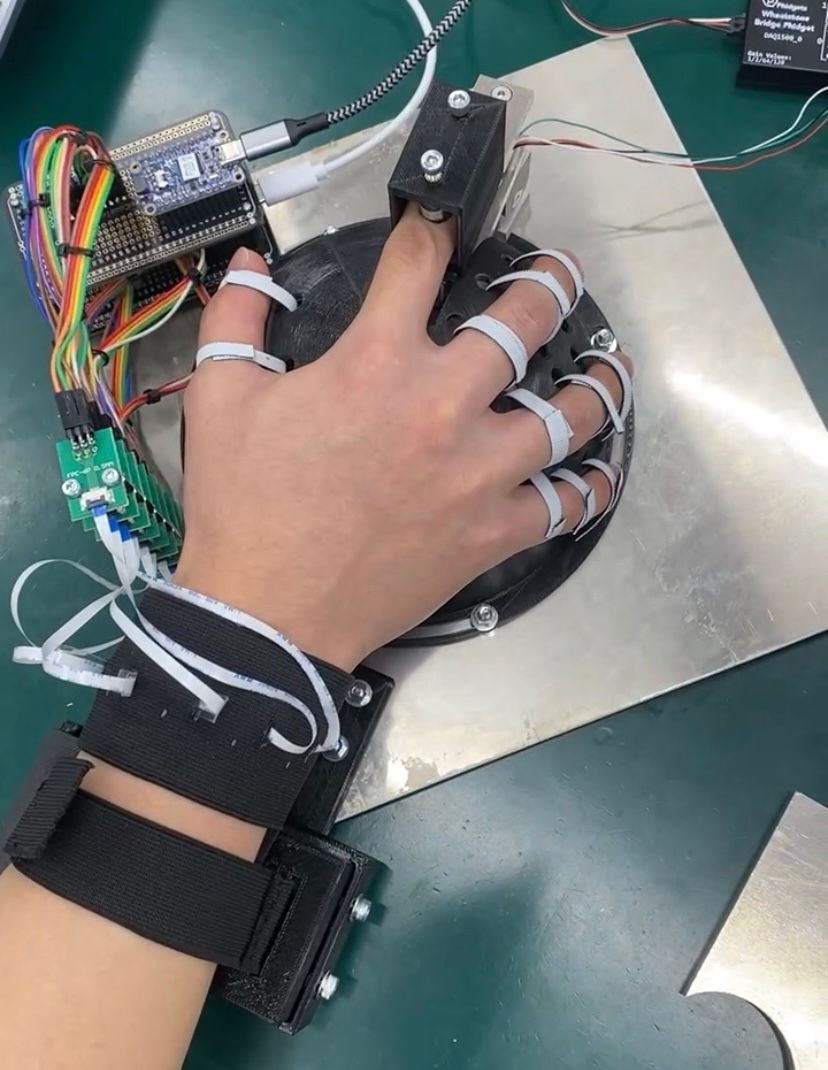
現在の研究では、前腕に超音波プローブを当て、同時に5個のロードセルで母指、示指、中指、環指、小指の屈曲力を計測します。各指の最大随意等尺性収縮(MVIC)を測定した後、モニター上に表示される0–0.5 MVICの目標値に対象指のみで追従する単指追従課題を行い、超音波画像と五指力を同時に取得します。取得した力信号は指別MVIC比として正規化し、超音波画像と同一フレームIDで対応付けます。
推定モデルには、CNNとLSTMを組み合わせたCNN-LSTMモデルを用いています。入力には、現在画像、安静時差分画像、時間差分画像を3チャンネル画像として統合し、連続8フレームの時系列画像として与えます。CNNで各フレームの画像特徴を抽出し、LSTMで時間方向の変化を統合することで、五指それぞれのMVIC比を同時に推定します。
本研究では、9名の参加者から取得したデータを用いて、参加者内4分割交差検証により評価を行いました。その結果、全指平均でRMSE = 0.070、MAE = 0.043となり、前腕Bモード超音波画像から五指屈曲力を同時かつ連続的に推定できる可能性を示しました。一方で、小指では誤差が大きく、環指と小指の間に弱い正の相関が確認されました。この要因として、深指屈筋の腱構造に由来する指間連動や、対象指以外の不随意力の混入が考えられます。
今後は、五指の推定精度向上に向けて、プローブ位置や固定方法の検討、指間連動を考慮した学習条件の改善、多指同時発揮条件での評価を進めていきます。これらの研究を通して、VR、義手、ロボット操作などに応用可能な身体入力インタフェースの実現を目指しています。

現在
複数人でのデータを含めた学習を行うために装置の改良を行い、将来の展望として五指のそれぞれ独立した屈曲力のリアルタイム推定を行うために研究を行っています。
